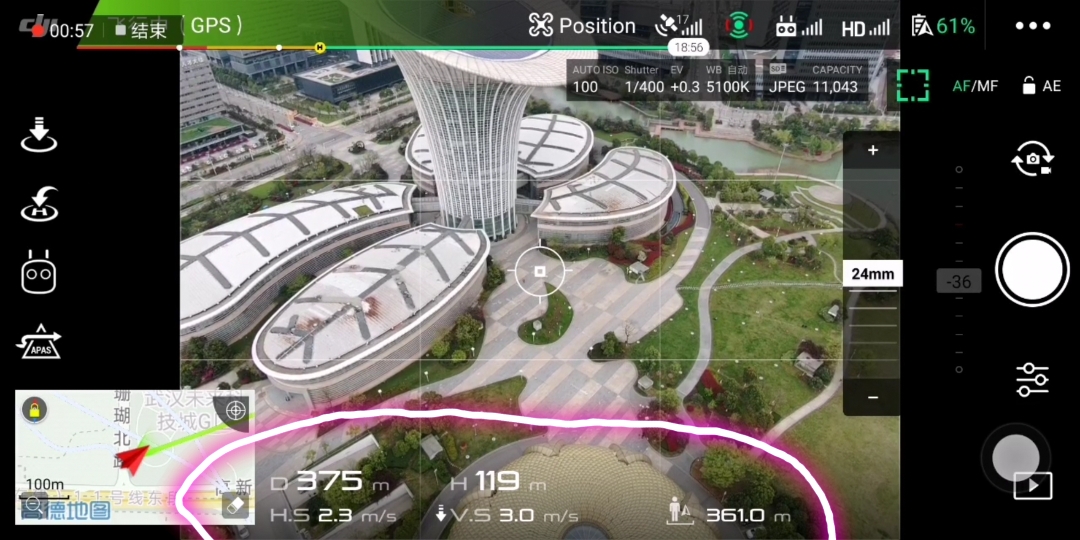
D: 代表无人机离返航点的水平距离,以米为单位;
H.S:代表无人机的相对水平速度,以米/秒为单位;
H: 代表无人距离返航点的垂直高度,以米为单位;
V.S:代表无人机相对升降速度,以米/秒为单位;
最右方的参数:代表无人机与遥控器的距离,在低空飞行时,此参数会变成VPS,也就是无人机与下方障碍物的垂直距离。
举个例子,我们在山腰起飞,无人机一直沿山体攀升,H值已经达到几百米,但VPS值可能只有几米,也就是说"无人机距离我们已经升到很高,但距离它当前的下方障碍物却很低"。所以要注意这个参数。
从这些参数,我们可以实时监控无人机,结合我们对航拍目标数据的掌握,可以迅速、准确、安全地完成航拍任务。
当然,前提是,我们掌握航拍目标的数据。
例1,我事先知道拍摄目标高120米,需要环绕目标飞行拍摄目标“顶部和躯干”,那么我们设置150米的返航高度已经足够。万一无人机飞到目标后面时失去信号,也能保证无人机能够跨过该目标进行返航。
例2,我的拍摄目标近处有群山,群山最高相对高度200米,那么我们设置230米的返航高度,即较能保证万一无人机失联、失控而触发自动返航时,可以跨过群山,安全返航。当然,比障碍物高出多少这个自行通过经验判断,不一定是高30米,只要留足够误差空间就行。
那么问题来了,我们如何掌握现场环境的高度等数据。
一方面,我们可以通过环境、网络、景区标示等途径获取信息,判断出拍摄目标的高度,无论大厦、桥梁、高山,通过网络和景区获得高度并不难。
需要注意的是,在山区,你还得通过A点的海拔,计算相对高度。例如你知道目标高山的海拔是400米,但是你用来起飞的那个观景平台海拔高度是300米,那么拍摄目标的相对高度应该是100米,而不是400米。
另一方面,如果没有找到信息,你还可以通过现场勘察和比对。例如,无人机升到明显高于某个障碍物时,你留意一下屏幕下方“H”的数值,就可以知道飞越这个障碍物的安全高度大概是多少。
又例如,现场你看到,拍摄目标是一座住宅楼,楼高30层,那么你基本可以判断该障碍物高度应该不会低于90米。
需要注意的是,用现场勘察和比对的方法观察需要更仔细,反复多角度观察,而且必须留出更多的误差空间。
有朋友会说,搞这么多精密计算,做那么多功课,弄得飞行很麻烦。对,但要尽力保证每次飞行都不炸鸡,这些都是重要的功课,难怪老司机都说"出色的飞手,都是上知天文,下通地理。"

【会说谎的参数】
数据是值得掌握和信赖的,但是,并非百分之百可靠,这里可能还藏了“一刀”。
一般无人机使用气压计测量当前高度,当然任何数据都会有误差,只是数据过于微小时,很多时候可以忽略不计。
但是随着飞行时间的增加,气压计会由于温飘使这个误差陡然增加。
因此,在每次飞行的后半段,飞手的每个判断都要留多一点的误差空间,尤其是低空飞行的时候,否则有机会刮到下方的障碍物造成炸机。
【这种情况不要设置返航高度】
有一种特殊情况,最好不要设置返航高度。
就是穿越拍摄的时候。例如,穿过洞穴、桥洞、大
厦门
洞等。
